
Application of low-altitude airspace UAVs in beach terrain monitoring
-
摘要:
消费级无人机的普及使得海滩监测有新的选择,但不同无人机平台的监测精度与适用情景各异,有必要进行适用性评价。本研究利用两种无人机平台(精灵4 RTK、经纬M300 RTK)与两种地形监测技术(SFM摄影测量、激光雷达)在象山县大沙海滩进行海滩地形监测,计算低空无人机监测海滩地形的平面误差与高程误差,分析不同无人机平台准同步监测结果之间的差异及其原因;利用无人机监测结果分析大沙海滩的地形特征,讨论海滩地形冬季前后变化。分析结果显示,无人机平台能胜任高精度的海滩地形变化监测工作。
Abstract:With the development of consumer-grade unmanned aerial vehicles (UAVs), new possibilities for beach monitoring are now available. However, different monitoring accuracies and suitability exist across different UAV platforms. We employed two UAV platforms, namely the DJI Phantom 4 RTK and DJI M300 RTK, in combination with two terrain monitoring techniques: Structure from Motion (SFM) photogrammetry and Light Detection and Ranging (LIDAR), to undertake beach terrain monitoring at Dasha Beach in Xiangshan County, Zhejiang, East China. The planimetric and elevation errors of low-altitude UAV measurements were assessed. Differences among the synchronously monitored results of diverse UAV platforms were analyzed, and their respective application scenarios were discussed. Additionally, we analyzed beach terrain characteristics and investigated beach terrain variations before and after winter. The analysis results show that the drone platform is capable of performing high-precision monitoring of beach topographic changes.
-
海滩是由激浪和激浪流作用,在海滨塑造形成的松散沉积物堆积体[1],其自然侵蚀过程往往因人类活动或极端天气事件发生加速或侵蚀程度剧增,即在短时间内引起较大的地形变化[2-3]。据1984—2016年间卫星海岸线数据的分析显示,全球24%的砂质海滩正以超过0.5 m/a的速率遭受侵蚀[4],有学者预测到2050年,全球13.6%~15.2%的沙滩将遭受侵蚀,到21世纪末,这个比例将提升至35.7%~49.5%[5]。中国海滩侵蚀现状同样严峻[6-7],2010年国家海洋局报告显示,全国49.5%的砂质海岸及7.3%的粉砂淤泥质海岸正在遭受侵蚀[8]。据联合国政府间气候变化专门委员会(IPCC,Intergovernmental Panel on Climate Change)估计,至2100年海平面将上升50 cm,有研究预测届时中国主要旅游海滨沙滩的面积将损失13%~66%[9]。随着全球气候变化及人类活动的影响,海滩侵蚀的状况也在日益加剧。为了能更好地对海滩进行管理和维护,需要更准确、分辨率更高的地形测量方法来监测海滩并对其形态变化状况进行量化[10]。
目前,较为广泛使用的海滩监测技术包括全球定位系统实时动态测量(RTK-GNSS,Real Time Kinematic-Global Navigation Satellite System)、光学卫星遥感影像、激光雷达测量、无人机SFM(Structure from Motion)摄影测量等[11-12]。不同的方法各有优劣,RTK-GNSS技术虽然精度较高,但在实际测量过程中耗时较长,更适用于小区域测量[13-14];光学卫星遥感影像在大区域尺度的监测工作中占有优势,有较高的分辨率与准确性(分米级),但容易受到地球上空云层的影响[15-16];航空摄影测量的数据质量和更新速率优于卫星遥感,但是调查结果的可重复性取决于预算[17];激光雷达测量包括地面激光雷达与机载激光雷达,地面激光雷达可以生成高精度的地形数据,还能进一步对侵蚀状况进行分析,但是其测量范围受到激光视域的限制[18];机载激光雷达能获取大范围的高精度地形数据,但受到天气的限制[19-20]。此外,卫星遥感、航空摄影、地面和机载雷达的监测成本也比较高。相较于其他监测方法,无人机SFM摄影测量是一种基于立体摄影测量原理的三维地形重建技术[21-22],具备数据分辨率高、监测区域广、对监测对象的影响小、可重复性强、适用海岸类型广泛等特点[23]。此外,消费级无人机的普及大大降低了无人机平台应用于地形监测的成本,使得这一技术的应用得以快速扩展[24-25]。
本研究以浙江省象山县南田岛大沙沙滩为研究区,以中国大疆创新公司生产的Phantom 4 RTK(简称P4)和经纬M300 RTK(简称M300)两种无人机平台为载体,对海滩地形进行监测,获取不同时期、不同监测高度、不同类型的数据共计5组。基于处理后所得到的数字地表模型(DSM, Digital Surface Model)数据,分析无人机平台类型、飞行高度、监测方法等多方面因素对海滩地形监测数据的影响。以大沙沙滩冬季前后海滩变化监测为例,展示低空无人机平台海滩应用于海滩监测的效果,为无人机海滩监测进一步应用提供参考,为更好地管理与养护海滩做出贡献。
1. 材料与方法
1.1 低空无人机参数
综合各项规定与标准[26-29],本研究将飞行高度低于1000 m的航空摄影无人机平台定义为低空无人机平台。使用P4(搭载测绘相机等模块,可进行SFM摄影测量)与M300(搭载禅思L1镜头,集成测绘相机、激光雷达等模块,可同时进行SFM摄影测量与激光雷达测量)两种低空无人机平台完成海滩监测,无人机平台参数详见表1。
表 1 无人机平台硬件参数Table 1. Hardware parameters of two drone platforms used in this study硬件参数 精灵4 RTK 经纬M300 RTK 硬件成本/(万元/台) 3.5 15.0 负载模块 测绘相机 测绘相机;激光雷达 测绘相机像素 有效像素2000万 有效像素2000万 激光雷达精度/m① — 平面精度0.1;高程精度0.05 飞行器定位精度② 垂直精度1.5 cm
水平精度1 cm垂直精度1.5 cm
水平精度1 cm最大水平飞行速度/(m/s) 14 17 最大信号范围/km 7 15 单组电池飞行时间/min 30 55 注:① 为生产商提供的技术参数,禅思L1的激光雷达系统在飞行高度为50 m的情况下平面精度为0.1 m,高程精度为0.05 m。② 表中所列定位精度为RTK启用且有固定解时的初始精度,此外,飞行器与起飞点的距离每增加1 km,误差也会增加1 mm。 1.2 数据采集
选定浙江省象山县南田岛大沙沙滩作为研究区(图1)。大沙沙滩位于象山县南田岛东部,属于岬湾型海滩,长约800 m,宽约150 m,海滩表面沉积物主要为砂质。附近海域属于正规半日潮,潮流类型为旋转流[30],最大潮流平均流速为65 cm/s[31]。沿海波浪以涌浪为主的混合浪达99%左右,年平均波高为0.4 m,最大波高为1.7 m,年平均波周期为7.2 s,最大波周期为13.1 s,波浪具有明显的季节变化,混合浪中,涌浪的常浪向为东向,冬季则多北东、东向,夏季多南、东南向。风浪的浪向,常受季风影响,秋季多北、北东向,夏季多偏南向[31],浪向转换时间在5月及9、10月间。大沙沙滩是浙江少有的海滩剖面较为完整、有海岸沙丘存在、受人类活动影响较小的天然海滩,其表面沉积物粒度分选较好,滩面无植被覆盖,反射特征一致,减小了其他因素的影响,是进行无人机海滩监测技术评价的理想地点。
![]() 图 1 大沙沙滩的地理区位及监测范围a:大沙沙滩地理区位;b:海滩监测范围,红框为测次A、B监测范围,蓝框为测次C、D、E监测范围。Figure 1. Location of Dasha Beach and the monitoring areasa: geographic location of Dashan Beach; b: beach monitoring range, red box for monitoring areas A and B, blue box for monitoring areas C, D, and E.
图 1 大沙沙滩的地理区位及监测范围a:大沙沙滩地理区位;b:海滩监测范围,红框为测次A、B监测范围,蓝框为测次C、D、E监测范围。Figure 1. Location of Dasha Beach and the monitoring areasa: geographic location of Dashan Beach; b: beach monitoring range, red box for monitoring areas A and B, blue box for monitoring areas C, D, and E.本研究分别于2022年12月23日冬季大潮低潮位、2023年4月7日春季大潮低潮位、2023年4月9日春季中潮低潮位在大沙沙滩完成了5个测次的海滩监测(表2);所有测次统一采用WGS-84坐标系,其飞行高度为相对于起飞点的高度。测次A与B均进行了整个大沙海滩的地形监测(图1b红框),测次C、D和E仅完成了大沙沙滩部分区域的地形监测(图1b蓝框)。所有测次重叠度设置与影像地面采样间隔(GSD,Ground Sampling Distance)均符合GB/T 39612-2020内航摄基准面地面分辨率设计范围要求[28]。
表 2 不同测次的无人机平台及摄影技术参数Table 2. Two drone platforms and photogrammetric parameters for different surveys测次
编号测次日期 无人机平台 监测技术① 飞行高
度/m潮相
及潮位航向重
叠/%旁向重
叠/%覆盖面
积/km2GSD②
(cm/pixel)照片数
量/张飞行历
时/minA 2022-12-23 精灵4 RTK SFM摄影测量
(井字飞行)60 大潮
低潮位80 80 0.352 2.30 1921 82 B 2023-04-07 精灵4 RTK SFM摄影测量
(井字飞行)60 大潮
低潮位80 80 0.370 2.38 1918 81 C 2023-04-09 精灵4 RTK SFM摄影测量
(2D)30 中潮
低潮位80 70 0.044 1.13 371 16 D 2023-04-09 经纬M300 RTK SFM摄影测量
(2D)30 中潮
低潮位70 70 0.045 1.01 487 20 E 2023-04-09 经纬M300 RTK 单回波激光雷达
(LiDAR)30 中潮
低潮位70 70 0.045 —③ —③ 20 注:① “井字飞行模式”的飞行姿态为倾斜摄影,航迹线有垂直于岸线及平行于岸线的两组,似“井”字(图2a,图2b);“SFM摄影测量(2D)模式”飞行时所得数据为正射影像,仅有单方向航线(图2c、d);“单回波激光雷达”对一个目标点位仅打出一个激光点、且最多接收1个回波。
② 地面采样间隔(GSD,Ground Sampling Distance),单位为cm/pixel,其数值大小与相对地面的飞行高度有关,表内GSD数据为监测区域内地面采样间隔平均值;③ 激光雷达测量所得数据类型为数字点云,无影像数据。监测过程中,共布设了像控点、检查点、验证点三种点位(图2,表3),用于分析无人机SFM摄影测量的准确性和误差。像控点与检查点是在沙滩表面放置的30 cm×30 cm的木制板状标志物(图2e);另在监测区域均匀选取海滩剖面,每个剖面选取10个点位作为验证点,验证点无地面标志物(图2f)。使用中海达IRTK5 X测量型GNSS接收机结合商业CORS系统(千寻知寸,定位精度厘米级)对上述所有点位进行定位。
![]() 图 2 大沙沙滩SFM摄影测量航迹线及质量控制点位分布状况a:测次A,b:测次B,c:测次C,d:测次D,e:像控点及检查点(有标志物),f:验证点(无标志物)。Figure 2. SFM photogrammetric flight lines and distribution of the mapping quality points at Dasha Beacha: Flight A, b: Flight B, c: Flight C, d: Flight D, e: image control points and check points (with markers), f: validation points (without markers).表 3 像控点、检查点和验证点的数量Table 3. The quantity of image control points, check points, and validation points
图 2 大沙沙滩SFM摄影测量航迹线及质量控制点位分布状况a:测次A,b:测次B,c:测次C,d:测次D,e:像控点及检查点(有标志物),f:验证点(无标志物)。Figure 2. SFM photogrammetric flight lines and distribution of the mapping quality points at Dasha Beacha: Flight A, b: Flight B, c: Flight C, d: Flight D, e: image control points and check points (with markers), f: validation points (without markers).表 3 像控点、检查点和验证点的数量Table 3. The quantity of image control points, check points, and validation points测次编号 地面像控点数量/个 检查点数量/个 验证点数量/个 A 6 1 33 B 7 1 40 C 6 5 60 D 7 4 60 地面像控点一般用于SFM摄影测量,作用有两方面:一是在内业处理过程中优化无人机影像或激光雷达与像控点的匹配结果,二是用于验证无人机影像或激光雷达初步反演的地形结果的准确性[32],检查点一般为预留的冗余地面像控点[28],同样布设了地面标志物。在利用像控点对影像匹配结果进行优化并得到沙滩高程数据后,可利用检查点通过刺点方式分析高程数据准确性。验证点数量与分布区域均大于像控点与检查点,利用验证点,可以对监测区域不同位置高程数据准确性进行更全面精细的分析评估,讨论监测结果的可用性[33-34]。
1.3 数据处理
利用Pix4D Mapper以及Global Mapper软件对无人机数据进行内业处理,Pix4D负责完成原始无人机影像的处理,输出正射影像与数字地表模型(Digital Surface Model,DSM)数据。Global Mapper主要实现三方面的功能:一是提取验证点的DSM高程数据,以RTK-GNSS测量数据为真值,对DSM高程数据准确性进行验证与比对;二是对测次C、D、E的DSM数据进行叠置分析,对比不同无人机平台或监测技术监测结果的差异;三是利用测次A、B数据叠置分析结果讨论海滩地形的变化,并提取垂直于岸线的典型海滩剖面走势,分析海滩剖面特征,验证无人机应用于海滩监测的效果。
在统计分析过程中,参考低空数字航摄国标要求[28],计算每个测次像控点x、y、z方向的RTK-GNSS测量值与反演值之间的均方根误差(RMSE,Root Mean Squared Error),见式1,并进一步分析平面误差(式2)、高程误差、整体误差(式3),同时计算检查点与验证点的RTK-GNSS测量高程值与反演高程值的均方根误差:
$$ \mathrm{R}\mathrm{M}\mathrm{S}\mathrm{E}=\sqrt{\frac{{\displaystyle\sum }_{i=1}^{n}{\left({c}_{i}-{f}_{i}\right)}^{2}}{n}} $$ (1) $$ p=\sqrt{{a}^{2}+{b}^{2}} $$ (2) $$ d=\sqrt{{p}^{2}+{c}^{2}} $$ (3) 式中,RMSE为均方根误差,n为点位数量,ci为RTK-GNSS测量值,fi为无人机监测反演值;p为平面误差,d为整体误差,a、b、c分别为x、y和z向的均方根误差。
此外,将验证点反演高程值结合RTK-GNSS测量值计算协方差$ \mathrm{c}\mathrm{o}\mathrm{v} $(式4):
$$ \mathrm{c}\mathrm{o}\mathrm{v}=\frac{\displaystyle\sum _{i=1}^{n}\left({x}_{i}-\bar{x}\right)\left({y}_{i}-\bar{y}\right)}{n} $$ (4) 式中,cov为协方差,判断RTK-GNSS数据与反演高程值之间差值分布的离散程度,讨论无人机监测过程中仪器输出的稳定程度;n为验证点数量,$ {x}_{i} $为验证点反演高程值,$ \bar{x} $为验证点反演高程值的平均值,$ {y}_{i} $为验证点RTK-GNSS测量值,$ \bar{y} $为验证点RTK-GNSS测量值的平均值。
2. 结果
2.1 航摄数据分辨率与误差
所有测次数据分辨率均在2.5 cm/pixel以下(表2),精度达到了厘米级。计算不同测次像控点RMSE,得到该测次数据整体平面误差、高程误差、整体误差(表4)。4次SFM摄影测量像控点数量大致相近,单方向误差均小于2.5 cm,平面误差最大值为3.09 cm,高程误差最大值为3.4 cm,整体误差最大为3.81 cm,像控点误差为厘米级。
表 4 SFM摄影测量像控点误差Table 4. The positioning error of image control points in SFM photogrammetrycm 测次编号 x向 y向 p z向 d A 0.65 0.98 1.16 3.40 3.59 B 2.20 2.17 3.09 2.23 3.81 C 1.04 0.90 1.38 1.36 1.94 D 1.42 0.72 1.59 1.54 2.21 5个测次检查点RMSE分别为4.51、4.89、2.78、2.41和6.44 cm,检查点RTK-GNSS高程测量值与反演高程值误差同样位于厘米级,说明无人机海滩监测结果与RTK-GNSS测量结果之间差异较小,无人机海滩监测数据具备可信度。
5组数据验证点RMSE值均为10 cm左右(图3),变化趋势与检查点一致。利用RTK-GNSS高程测量值与反演高程值绘制散点图并进行线性拟合,5组数据拟合结果R2均大于0.999,拟合程度较好;由于验证点均匀分布于整片海滩,所以拟合结果说明海滩整体反演高程值相较于RTK-GNSS数据误差较小,进一步说明其数据质量具有可信度。
![]() 图 3 各测次验证点准确性与误差a:测次A,b:测次B,c:测次C,d:测次D,e. 测次E。Figure 3. Accuracy and error at validation pointsa: Flight A, b: Flight B, c: Flight C, d: Flight D, e: Flight E.
图 3 各测次验证点准确性与误差a:测次A,b:测次B,c:测次C,d:测次D,e. 测次E。Figure 3. Accuracy and error at validation pointsa: Flight A, b: Flight B, c: Flight C, d: Flight D, e: Flight E.2023年4月9日完成的测次C飞行时间与测次D、E的时间间隔在2 h之内,测次D与测次E为同步测量,可以认为这3个测次为同步或准同步监测,监测过程中海滩地形基本无变化。提取准同步监测数据的验证点高程值,并结合RTK-GNSS数据计算两者间协方差(cov),结果见表5。利用同一时间、同一高度下不同无人机监测技术所得数据进行比较,发现P4与M300两平台监测稳定度相近,但仍有差异,P4平台监测稳定度低于M300平台。准同步监测对比结果显示,P4-SFM摄影测量稳定度最差,M300-SFM摄影测量次之,M300-LiDAR监测稳定度最高,M300-SFM摄影测量与M300-LiDAR监测稳定性差异极小。
表 5 准同步监测不同测次数据离散程度Table 5. The data dispersion level of measurement in different surveys in quasi-synchronous monitoring测次编号 协方差cov/m² 测次C (P4-SFM) 1.923 测次D (M300-SFM) 1.905 测次E (M300-LiDAR) 1.902 2.2 准同步海滩地形监测结果的差异
利用Global Mapper的叠置分析功能对测次C、D、E进行减法处理,分析3个测次所得准同步监测结果之间的差异(图4)。
![]() 图 4 沙滩高程准同步监测结果及其对比a:测次C,b:测次D,c:测次E,d:测次C与D差值,e:测次E与C差值,f:测次E与D差值。Figure 4. Quasi-synchronous monitoring results and their comparison of beach elevationsa: Flight C, b: Flight D, c: Flight E, d. Difference between Flight C and Flight D, e: difference between Flight E and Flight C, f: difference between Flight E and Flight D.
图 4 沙滩高程准同步监测结果及其对比a:测次C,b:测次D,c:测次E,d:测次C与D差值,e:测次E与C差值,f:测次E与D差值。Figure 4. Quasi-synchronous monitoring results and their comparison of beach elevationsa: Flight C, b: Flight D, c: Flight E, d. Difference between Flight C and Flight D, e: difference between Flight E and Flight C, f: difference between Flight E and Flight D.测次C与D之间整体差异最小(图4d),滩肩部位差值最接近于0 cm,后滨区域表现为测次C高程值较大或两测次差异较小,前滨滩面多呈现测次D高程值较大的情况。
测次E高程与另外两测次数据的差值更大(图4e,4f),其中滩肩及附近位置测次E激光雷达数据明显较高,滩肩向两侧差值减小逐渐接近于0 cm;在水边线附近,测次E高程值低于测次C、D这两种SFM摄影测量结果。
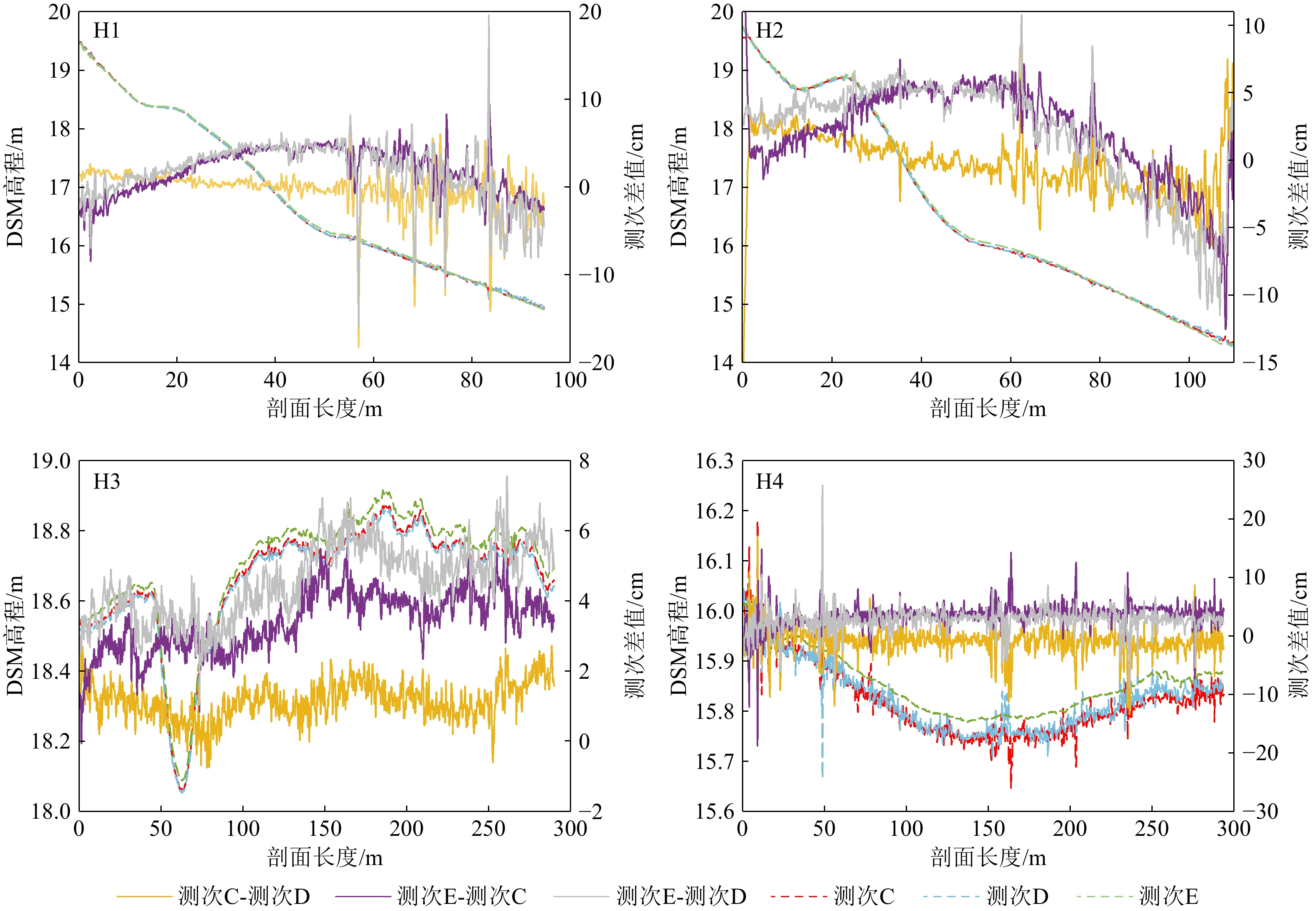
提取垂直岸线方向与平行岸线方向剖面各两条(图4a),进一步分析准同步监测的差异。垂直岸线方向的H1、H2剖面结果显示(图5),测次C与D整体差异较小,后滨高程绝对差值低于5 cm;测次C监测高程较高,前滨滩面差异较大,绝对差值最大可达20 cm,普遍表现为测次D监测高程较高;测次E与C、D之间的差异沿剖面变化趋势基本一致,由陆向海,测次E与C、D之间差值表现为由负到正再到负,测次E监测高程在剖面中部区域大多高于测次C、D。平行岸线方向的H3、H4剖面结果展示了准同步监测差异在后滨与前滨的区别(图5):H3剖面显示,后滨区域测次C与D差异较小,测次C监测高程大于测次D,差值均在3 cm以下,测次E监测高程多数大于测次C、D的监测高程,绝对差值最大值分别低于6、8 cm;H4剖面显示,前滨区域测次C与D差异较小,多数区域绝对差值在1 cm左右波动,测次E监测高程依旧明显高于测次C、D,多数区域绝对差值在4 cm左右。
2.3 海滩地形监测
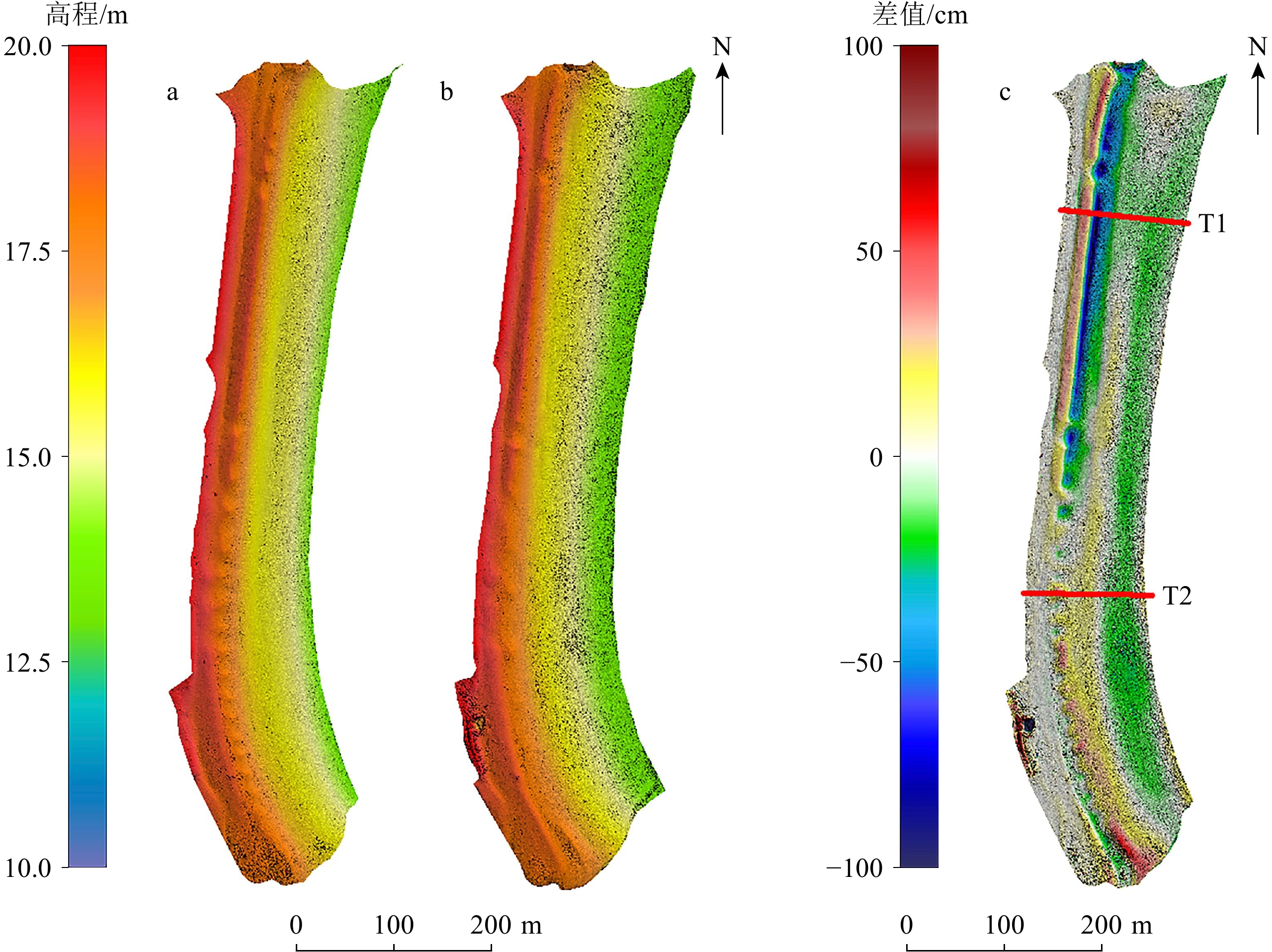
测次A与B像控点整体误差低于4 cm,检查点误差小于5 cm,验证点误差为10 cm左右,监测精度为厘米级,选择测次A与B的结果对大沙沙滩地形变化进行分析(图6a、b)。利用Global Mapper进行叠置分析(图6c),获取海滩地形冬季前后的变化状况,检验无人机海滩地形监测的效果。此外,在大沙沙滩地形变化较为代表性的区域提取了T1与T2两个剖面(图6c),进一步细化分析海滩高程变化状况(图7),直观展现无人机应用于海滩地形地貌监测的能力。
![]() 图 6 同平台、同参数的两期海滩地形监测结果及对比a:测次A数字表面模型,b:测次B数字表面模型,c:地形变化与剖面位置。Figure 6. Two-phase beach topography monitoring results and comparison under the same platform and parametersa: Digital surface model for Flight A; b: digital surface model for Flight B; c: terrain changes and profile locations.
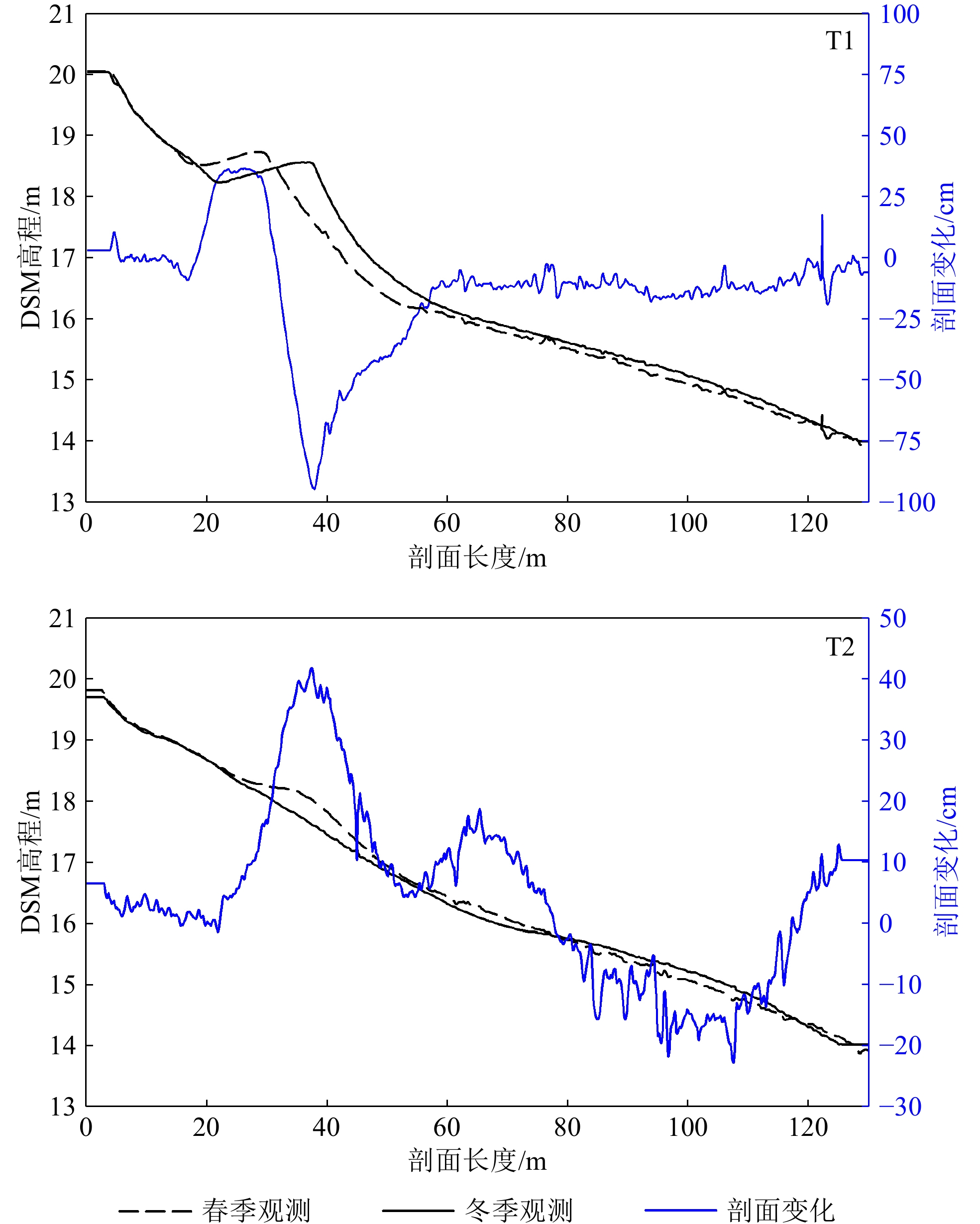
图 6 同平台、同参数的两期海滩地形监测结果及对比a:测次A数字表面模型,b:测次B数字表面模型,c:地形变化与剖面位置。Figure 6. Two-phase beach topography monitoring results and comparison under the same platform and parametersa: Digital surface model for Flight A; b: digital surface model for Flight B; c: terrain changes and profile locations.![]() 图 7 测次A、B所得海滩剖面形态及侵淤变化Figure 7. Monitoring results of beach profiles for Flight A and Flight B
图 7 测次A、B所得海滩剖面形态及侵淤变化Figure 7. Monitoring results of beach profiles for Flight A and Flight B研究区冬季监测海滩长约800 m,宽度最宽处约150 m,最窄处约105 m,高程基本位于13~20 m区间,约占大沙沙滩99.93%的区域,约0.07%的海滩高程处于20~21.6 m。春季海滩监测结果海滩长度基本无变化,监测区域宽度最宽处约165 m,最窄处约125 m,高程基本位于11~20 m,约占整个海滩99.76%的区域,约0.24%的海滩高程处于20~21.3 m之间。监测结果中54.15%的区域遭受侵蚀,研究区海滩大多呈现侵蚀状态,其中43.37%的区域侵蚀幅度低于20 cm;45.85%的堆积区域内,有35.85%的区域变化幅度低于20 cm,共计79.22%的区域变化幅度位于20 cm以内,说明海滩虽然处于变化状态,但大部分区域变化幅度并不剧烈。
于大沙沙滩地形变化较为代表性的区域提取了T1与T2两个剖面数据(图7),对剖面变化状况进行更细致直观的展现:
T1剖面:剖面类型基本保持原状为滩肩式断面,坡度减小,滩肩整体向后蚀退约8 m;后滨与滩肩陆侧部分区域呈现堆积,最大堆积高度约35 cm;滩肩向海侧与前滨滩面出现侵蚀,剖面最大侵蚀高度达到100 cm左右,滩肩以下近海区域变化幅度较小,侵蚀高度处于25 cm之内;剖面侵蚀区域单宽冲蚀量为20.17 m³/m,堆积区域单宽淤积量为3.72 m³/m,整体表现为侵蚀,单宽冲蚀量为16.45 m³/m。
T2剖面:剖面类型从沙坝式断面向滩肩式断面转变,滩肩长度较窄,坡度增大,剖面由陆向海呈现出先堆积后侵蚀的趋势,最大堆积高度约40 cm,最大侵蚀高度约20 cm;侵蚀区域单宽冲蚀量为4.52 m³/m,堆积区域单宽淤积量为9.72 m³/m。整体表现为堆积,单宽淤积量为5.20 m³/m。
整体来看,2条典型剖面分别表现为侵蚀与堆积。滩肩变化呈现南北分异,北部海滩滩肩向岸蚀退,坡度减小,后滨堆积,淤积幅度低于35 cm,滩肩整体表现侵蚀,最大侵蚀幅度约100 cm,前滨滩面多为侵蚀或上淤下侵,侵淤变化低于20 cm。南部海滩相较而言剖面形态更为稳定,后滨基本无变化,滩肩表现堆积,高度低于50 cm,前滨滩面多为侵蚀,高度低于20 cm。
3. 讨论
3.1 无人机平台获取海滩地形数据的质量
现有低空数字航测与数据处理国家标准(GB/T 39612-2020)规定了不同比例尺地图在各类地形下的像控点误差要求(表6)[28]。本研究在2.1节计算了不同测次的像控点误差,其中平面误差最大值为3.09 cm,高程误差最大值为3.40 cm(表4),完全符合GB/T 39612-2020对于野外像控点最严格要求、即1∶500成图比例尺的要求,表明本研究所用低空无人机平台测绘海滩地形的像控点测量误差全部符合国家标准。
表 6 低空数字航摄与数据处理规范规定的点位误差Table 6. The positioning errors specified in China’s national standard for low-altitude digital aerial photography and data processing点位类型 成图比例尺 平面误差/cm 高程误差/cm 平地 丘陵地 山地 高山地 平地 丘陵地 山地 高山地 像控点 1∶500 15 15 20 20 11 21 26 40 1∶1000 30 30 40 40 21 26 40 75 1∶2000 60 60 80 80 21 26 60 90 检查点与验证点 1∶500 25 25 35 35 19 35 40 60 1∶1000 50 50 70 70 35 40 60 120 1∶2000 100 100 140 140 35 40 100 150 GB/T 39612-2020对于检查点与验证点的误差同样提出了要求(表6)。本文2.1节计算了5组监测数据所有检查点反演高程误差,均符合国标要求,其中M300-激光雷达测量数据检查点误差最大,为6.44 cm,也远小于国标要求的19 cm。此外,提取了大量验证点用以验证无人机反演高程值的准确性(图8),共计260个点位精度数据中,仅有一个点位误差值大于19 cm,其余验证点误差均小于19 cm,进一步说明无人机在海滩地形监测工作中的适用性。
![]() 图 8 不同监测数据验证点高程误差红色横线为低空数字航测国家标准1∶500地形图要求的验证点高程限差。Figure 8. The elevation errors at validation points of different monitoring dataThe red line is the elevation tolerance limit as required by the national standard for 1:500 topographic maps in low-altitude digital aerial survey.
图 8 不同监测数据验证点高程误差红色横线为低空数字航测国家标准1∶500地形图要求的验证点高程限差。Figure 8. The elevation errors at validation points of different monitoring dataThe red line is the elevation tolerance limit as required by the national standard for 1:500 topographic maps in low-altitude digital aerial survey.本研究以单个测次反演结果与RTK-GNSS高精度测量结果之间的差异作为评判无人机平台精度的参考值,而海滩地形变化监测工作还应当在此基础上考虑海滩地形变化的精度,进一步给出海滩地形变化监测精度的评判方法。可以考虑布设水泥测桩或选取特征明显且固定的点位作为不动点,基于正射影像完成刺点,提取点位反演高程值,计算两次监测结果中不动点高程差值,并以此为参考判断海滩地形是否存在变化。若两次海滩地形监测结果的对比显示,有部分区域的地形变化幅度小于不动点变化值,则判断该区域的海滩地形基本不变;当对比监测结果的高程变化幅度大于不动点变化幅度时,才判断为存在地形变化的海滩。这方面的研究工作宜进一步深入。
3.2 无人机平台监测海滩地形的影响因素
3.2.1 无人机平台与监测技术的差异
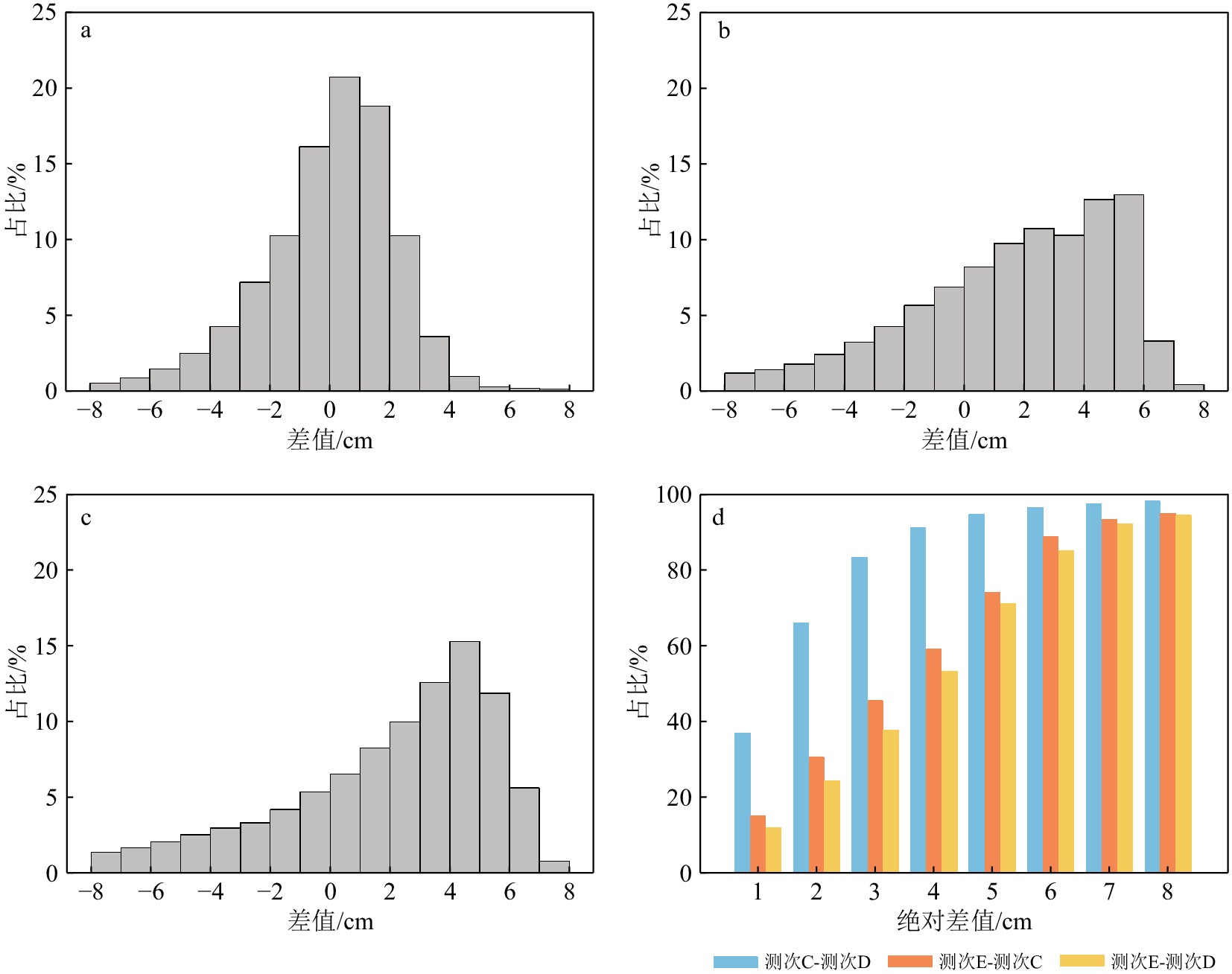
同一无人机平台、不同监测技术会造成地形监测的差异。本研究利用M300无人机平台在春季同步完成了SFM摄影测量与机载激光雷达测量的两组监测(参见图3d与图3e),尽管飞行高度、飞行区域、飞行时间等参数相同,其误差却截然不同。测次D检查点与验证点高程误差分别为2.41 cm与8.52 cm,测次E检查点与验证点高程误差分别为6.44 cm与12.08 cm;相较于M300-LiDAR激光雷达测量,M300-SFM摄影测量结果与RTK-GNSS结果更为接近。通过叠置分析得到测次E与测次D海滩监测结果之间的差值分布(图9c),结果显示,测次E的激光雷达测量结果更多高于测次D的SFM摄影测量结果,高程差值4~5 cm区间占比最大为15.3%(图9c),93.42%的区域高程绝对差值小于7 cm(图9d),共有71.32%的区域高程差值大于0 cm。结合两种监测技术与RTK-GNSS对比结果,可知相较于P4-SFM与M300-SFM监测结果,M300-LiDAR监测结果与RTK-GNSS结果差异更大,监测结果多数偏高。
![]() 图 9 准同步监测差值分布直方图a:测次C与D差值,b:测次E与C差值,c:测次E与D差值,d:准同步监测差值累积分布。Figure 9. Histogram of differences distribution from quasi-synchronous monitoringa: difference between Flight C and Flight D; b: difference between Flight E and Flight C; c: difference between Flight E and Flight D; d: cumulative distribution of quasi-synchronous monitoring differences.
图 9 准同步监测差值分布直方图a:测次C与D差值,b:测次E与C差值,c:测次E与D差值,d:准同步监测差值累积分布。Figure 9. Histogram of differences distribution from quasi-synchronous monitoringa: difference between Flight C and Flight D; b: difference between Flight E and Flight C; c: difference between Flight E and Flight D; d: cumulative distribution of quasi-synchronous monitoring differences.测次C与D均为30 m飞行高度下进行的SFM摄影测量,其中测次C的检查点与验证点RMSE分别为2.78、8.26 cm,测次D的检查点与验证点RMSE分别为2.41、8.52 cm。相较于P4平台完成SFM摄影测量的测次C,M300平台的测次D与RTK-GNSS测量值之间的差值更小,同为SFM摄影测量结果,M300平台海滩监测数据质量更高。测次C与D使用的是两种不同的无人机平台,其中P4平台监测结果更多高于M300平台监测结果,两测次之间的差异主要为4 cm以下(图9a),占据了91.22%的区域(图9d),其中0~1 cm区间占比最大为20.7%,55.37%的区域监测高程差值大于0 cm。结合以上分析与表4内容,可知当运用同种监测技术时,M300平台的飞行稳定性更高,其数据质量优于P4平台。
将测次C与E进行对比分析,可以进一步了解P4-SFM摄影测量监测结果与M300-激光雷达监测结果之间的差异(图9b)。测次C检查点与验证点RMSE分别为2.78、9.26 cm,测次E检查点与验证点RMSE分别为6.44、12.08 cm,测次C数据质量高于测次E。将两测次数据进行叠置分析,可以发现,5~6 cm区间占比最大(12.97%),92.26%的区域高程绝对差值集中于7 cm以下(图9d),68.85%的区域高程差值大于0 cm,M300-激光雷达监测结果同样普遍高于P4-SFM摄影测量监测结果。
3.2.2 海滩地物特征对监测技术的影响
由于不同监测技术之间的差异,监测地物本身的特点也将影响监测结果。SFM摄影测量是基于图像匹配算法开发的一种海滩监测技术,对图像纹理有较强的依赖[35],易受到海滩表面的光学性质的影响。因此SFM摄影测量在地形平坦、海滩砂粒度均一或具有较高反射率的海滩表面进行地形监测会面临较大的困难[20]。例如,滩肩以下的海滩存在滞留海水所形成的薄膜,会增加图像共同点的识别难度,对海滩监测结果造成影响[36]。两组SFM摄影测量监测结果中,由于海滩表面滞留海水的影响,其含水率较高,滩肩以下部分区域海滩监测结果有较多的噪声点,图5中H1、H2剖面的SFM摄影测量结果显示,后滨无水区域监测结果曲线平滑,前滨滩面由于表面滞留海水的影响,监测结果噪声点明显增多;而激光雷达数据则整体较为光滑,滩肩以下无明显噪声。影响激光雷达测量结果的原因在于传感器视域的限制,无法对近乎垂直地形进行监测[12],而SFM摄影测量则可以选择不同的监测角度,获取更多的侧面地物信息,避免出现由于角度导致的监测信息不全的问题。
3.2.3 其他因素
无人机参数设置同样会影响监测数据。以飞行高度为例,将春季两次不同高度P4监测数据对比,其像控点误差结果直观反映了飞行高度的影响:同一时段下,60 m飞行高度的像控点误差值均达到了30 m飞行高度的2倍左右。无人机SFM摄影测量检查点高程误差同样符合这一结论,以3次不同高度P4监测数据为例,30 m高度监测数据检查点的高程误差为2.78 cm,而60 m高度监测数据高程误差分别为4.51、4.89 cm。
人为因素主要为RTK-GNSS测量过程中的操作问题,影响检查点、验证点的RTK测量准确性,从而进一步映射到无人机反演DSM数据的准确性:徒手进行RTK-GNSS测量难以保证测量杆的姿态分毫不差,导致实测验证点的RTK高程比真实的海滩表面高程普遍偏低,误差为厘米级;而像控点与检查点由于布设了木制板状标志物,测量杆较容易控制,测量结果也相对更为准确,更能代表RTK-GNSS测量高程与无人机反演高程的比对结果。
4. 结论
本研究以砂质海滩的地形监测为例,运用P4与M300两种无人机平台、SFM摄影测量与激光雷达测量两种监测方法的组合获取了5组海滩监测数据,进行了海滩地形测绘准确性的比较,并进行了季节尺度的海滩地形变化监测结果的对比,得到以下结论。
(1)所有数据地面采样间隔均小于2.5 cm/pixel,精度为厘米级,监测结果精度较高, RTK-GNSS数据与反演高程数据拟合曲线R2均在0.999以上,且所有点位误差符合GB/T 39612-2020对于1∶500比例尺的要求,说明无人机海滩地形监测结果与RTK-GNSS测量结果相似度较高,数据质量具有可信度。
(2)对比不同无人机平台、同步测量结果,相同地物点的高程值之差均为厘米级。测量方式带来的差异大于无人机平台之间的差异,同种监测技术、不同无人机平台进行对比,测次C与D高程绝对差值主要为4 cm以下。不同监测技术进行对比,测次E激光雷达测量结果与测次C、D两次SFM摄影测量数据高程差值均主要为7 cm以下。相同无人机平台的监测误差会随着高度的增大而增大,测次B与C检查点高程误差分别为4.89 cm与2.78 cm。平坦、粒度均一的海滩将增加SFM摄影测量的实施难度,由于传感器视域限制,激光雷达测量应避免在地形近乎垂直区域使用。
(3)Phantom4 RTK无人机平台对大沙沙滩整体地形的分析与冬季前后地形变化的监测均有较好的效果。大沙沙滩99%以上的区域高程为13~20 m;自然因素影响下,北部海滩后滨堆积,淤高幅度低于35 cm,滩肩部位整体侵蚀,最大侵蚀幅度约100 cm,前滨滩面多为侵蚀或上淤下侵,侵淤变化低于20 cm;南部海滩后滨基本无变化,滩肩部位整体堆积,淤高幅度低于50 cm,前滨滩面多为侵蚀,侵蚀幅度低于20 cm,相较于北部海滩,南部海滩侵淤变化更为平稳。
-
![]()
图 1 大沙沙滩的地理区位及监测范围
a:大沙沙滩地理区位;b:海滩监测范围,红框为测次A、B监测范围,蓝框为测次C、D、E监测范围。
Figure 1. Location of Dasha Beach and the monitoring areas
a: geographic location of Dashan Beach; b: beach monitoring range, red box for monitoring areas A and B, blue box for monitoring areas C, D, and E.
![]()
图 2 大沙沙滩SFM摄影测量航迹线及质量控制点位分布状况
a:测次A,b:测次B,c:测次C,d:测次D,e:像控点及检查点(有标志物),f:验证点(无标志物)。
Figure 2. SFM photogrammetric flight lines and distribution of the mapping quality points at Dasha Beach
a: Flight A, b: Flight B, c: Flight C, d: Flight D, e: image control points and check points (with markers), f: validation points (without markers).
![]()
图 3 各测次验证点准确性与误差
a:测次A,b:测次B,c:测次C,d:测次D,e. 测次E。
Figure 3. Accuracy and error at validation points
a: Flight A, b: Flight B, c: Flight C, d: Flight D, e: Flight E.
![]()
图 4 沙滩高程准同步监测结果及其对比
a:测次C,b:测次D,c:测次E,d:测次C与D差值,e:测次E与C差值,f:测次E与D差值。
Figure 4. Quasi-synchronous monitoring results and their comparison of beach elevations
a: Flight C, b: Flight D, c: Flight E, d. Difference between Flight C and Flight D, e: difference between Flight E and Flight C, f: difference between Flight E and Flight D.
![]()
图 6 同平台、同参数的两期海滩地形监测结果及对比
a:测次A数字表面模型,b:测次B数字表面模型,c:地形变化与剖面位置。
Figure 6. Two-phase beach topography monitoring results and comparison under the same platform and parameters
a: Digital surface model for Flight A; b: digital surface model for Flight B; c: terrain changes and profile locations.
![]()
图 7 测次A、B所得海滩剖面形态及侵淤变化
Figure 7. Monitoring results of beach profiles for Flight A and Flight B
![]()
图 8 不同监测数据验证点高程误差
红色横线为低空数字航测国家标准1∶500地形图要求的验证点高程限差。
Figure 8. The elevation errors at validation points of different monitoring data
The red line is the elevation tolerance limit as required by the national standard for 1:500 topographic maps in low-altitude digital aerial survey.
![]()
图 9 准同步监测差值分布直方图
a:测次C与D差值,b:测次E与C差值,c:测次E与D差值,d:准同步监测差值累积分布。
Figure 9. Histogram of differences distribution from quasi-synchronous monitoring
a: difference between Flight C and Flight D; b: difference between Flight E and Flight C; c: difference between Flight E and Flight D; d: cumulative distribution of quasi-synchronous monitoring differences.
表 1 无人机平台硬件参数
Table 1 Hardware parameters of two drone platforms used in this study
硬件参数 精灵4 RTK 经纬M300 RTK 硬件成本/(万元/台) 3.5 15.0 负载模块 测绘相机 测绘相机;激光雷达 测绘相机像素 有效像素2000万 有效像素2000万 激光雷达精度/m① — 平面精度0.1;高程精度0.05 飞行器定位精度② 垂直精度1.5 cm
水平精度1 cm垂直精度1.5 cm
水平精度1 cm最大水平飞行速度/(m/s) 14 17 最大信号范围/km 7 15 单组电池飞行时间/min 30 55 注:① 为生产商提供的技术参数,禅思L1的激光雷达系统在飞行高度为50 m的情况下平面精度为0.1 m,高程精度为0.05 m。② 表中所列定位精度为RTK启用且有固定解时的初始精度,此外,飞行器与起飞点的距离每增加1 km,误差也会增加1 mm。  下载: 导出CSV
下载: 导出CSV
表 2 不同测次的无人机平台及摄影技术参数
Table 2 Two drone platforms and photogrammetric parameters for different surveys
测次
编号测次日期 无人机平台 监测技术① 飞行高
度/m潮相
及潮位航向重
叠/%旁向重
叠/%覆盖面
积/km2GSD②
(cm/pixel)照片数
量/张飞行历
时/minA 2022-12-23 精灵4 RTK SFM摄影测量
(井字飞行)60 大潮
低潮位80 80 0.352 2.30 1921 82 B 2023-04-07 精灵4 RTK SFM摄影测量
(井字飞行)60 大潮
低潮位80 80 0.370 2.38 1918 81 C 2023-04-09 精灵4 RTK SFM摄影测量
(2D)30 中潮
低潮位80 70 0.044 1.13 371 16 D 2023-04-09 经纬M300 RTK SFM摄影测量
(2D)30 中潮
低潮位70 70 0.045 1.01 487 20 E 2023-04-09 经纬M300 RTK 单回波激光雷达
(LiDAR)30 中潮
低潮位70 70 0.045 —③ —③ 20 注:① “井字飞行模式”的飞行姿态为倾斜摄影,航迹线有垂直于岸线及平行于岸线的两组,似“井”字(图2a,图2b);“SFM摄影测量(2D)模式”飞行时所得数据为正射影像,仅有单方向航线(图2c、d);“单回波激光雷达”对一个目标点位仅打出一个激光点、且最多接收1个回波。
② 地面采样间隔(GSD,Ground Sampling Distance),单位为cm/pixel,其数值大小与相对地面的飞行高度有关,表内GSD数据为监测区域内地面采样间隔平均值;③ 激光雷达测量所得数据类型为数字点云,无影像数据。
下载: 导出CSV
表 3 像控点、检查点和验证点的数量
Table 3 The quantity of image control points, check points, and validation points
测次编号 地面像控点数量/个 检查点数量/个 验证点数量/个 A 6 1 33 B 7 1 40 C 6 5 60 D 7 4 60
下载: 导出CSV
表 4 SFM摄影测量像控点误差
Table 4 The positioning error of image control points in SFM photogrammetry
cm 测次编号 x向 y向 p z向 d A 0.65 0.98 1.16 3.40 3.59 B 2.20 2.17 3.09 2.23 3.81 C 1.04 0.90 1.38 1.36 1.94 D 1.42 0.72 1.59 1.54 2.21
下载: 导出CSV
表 5 准同步监测不同测次数据离散程度
Table 5 The data dispersion level of measurement in different surveys in quasi-synchronous monitoring
测次编号 协方差cov/m² 测次C (P4-SFM) 1.923 测次D (M300-SFM) 1.905 测次E (M300-LiDAR) 1.902
下载: 导出CSV
表 6 低空数字航摄与数据处理规范规定的点位误差
Table 6 The positioning errors specified in China’s national standard for low-altitude digital aerial photography and data processing
点位类型 成图比例尺 平面误差/cm 高程误差/cm 平地 丘陵地 山地 高山地 平地 丘陵地 山地 高山地 像控点 1∶500 15 15 20 20 11 21 26 40 1∶1000 30 30 40 40 21 26 40 75 1∶2000 60 60 80 80 21 26 60 90 检查点与验证点 1∶500 25 25 35 35 19 35 40 60 1∶1000 50 50 70 70 35 40 60 120 1∶2000 100 100 140 140 35 40 100 150
下载: 导出CSV
-
[1] 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. GB/T 18190-2017 海洋学术语 海洋地质学[S]. 北京: 中国标准出版社, 2017 General Administration of Quality Supervision, Inspection and Quarantine of the People's Republic of China, Standardization Administration of the People's Republic of China. GB/T 18190-2017 Oceanological Terminology—Marine Geology[S]. Beijing: Standards Press of China, 2017.
[2] Chen B Q, Yang Y M, Wen H T, et al. High-resolution monitoring of beach topography and its change using unmanned aerial vehicle imagery[J]. Ocean & Coastal Management, 2018, 160:103-116.
[3] 蔡锋, 苏贤泽, 刘建辉, 等. 全球气候变化背景下我国海岸侵蚀问题及防范对策[J]. 自然科学进展, 2008, 18(10):1093-1103 doi: 10.3321/j.issn:1002-008X.2008.10.002 CAI Feng, SU Xianze, LIU Jianhui, et al. The countermeasures of coastal erosion based on the global climate change[J]. Progress in Natural Science, 2008, 18(10):1093-1103. doi: 10.3321/j.issn:1002-008X.2008.10.002
[4] Luijendijk A, Hagenaars G, Ranasinghe R, et al. The state of the world's beaches[J]. Scientific Reports, 2018, 8(1):6641. doi: 10.1038/s41598-018-24630-6
[5] Vousdoukas M I, Ranasinghe R, Mentaschi L, et al. Sandy coastlines under threat of erosion[J]. Nature Climate Change, 2020, 10(3):260-263. doi: 10.1038/s41558-020-0697-0
[6] 李兵, 蔡锋, 曹立华, 等. 福建砂质海岸侵蚀原因和防护对策研究[J]. 台湾海峡, 2009, 28(2):156-162 LI Bing, CAI Feng, CAO Lihua, et al. Causes of beach erosion in Fujian and preventions[J]. Journal of Oceanography in Taiwan Strait, 2009, 28(2):156-162.
[7] 王广禄, 蔡锋, 苏贤泽, 等. 泉州市砂质海岸侵蚀特征及原因分析[J]. 台湾海峡, 2008, 27(4):547-554 WANG Guanglu, CAI Feng, SU Xianze, et al. Characters of sand beach erosion in Quanzhou and it causes[J]. Journal of Oceanography in Taiwan Strait, 2008, 27(4):547-554.
[8] 罗时龙, 蔡锋, 王厚杰. 海岸侵蚀及其管理研究的若干进展[J]. 地球科学进展, 2013, 28(11):1239-1247 LOU Shilong, CAI Feng, WANG Houjie. Development of coastal erosion and management[J]. Advances in Earth Science, 2013, 28(11):1239-1247.
[9] 王颖, 吴小根. 海平面上升与海滩侵蚀[J]. 地理学报, 1995, 50(2):118-127 doi: 10.3321/j.issn:0375-5444.1995.02.003 WANG Ying, WU Xiaogen. Sea level rise and beach response[J]. Acta Geographica Sinica, 1995, 50(2):118-127. doi: 10.3321/j.issn:0375-5444.1995.02.003
[10] Muzirafuti A, Randazzo G, Lanza S. UAV application for coastal area monitoring: a case study of Sant’Alessio Siculo, Sicily[C]//Proceedings of 2022 IEEE International Workshop on Metrology for the Sea; Learning to Measure Sea Health Parameters (MetroSea). Milazzo: IEEE, 2022: 143-147.
[11] Baily B, Nowell D. Techniques for monitoring coastal change: a review and case study[J]. Ocean & Coastal Management, 1996, 32(2):85-95.
[12] Westoby M J, Lim M, Hogg M, et al. Cost-effective erosion monitoring of coastal cliffs[J]. Coastal Engineering, 2018, 138:152-164. doi: 10.1016/j.coastaleng.2018.04.008
[13] Turner I L, Harley M D, Short A D, et al. A multi-decade dataset of monthly beach profile surveys and inshore wave forcing at Narrabeen, Australia[J]. Scientific Data, 2016, 3(1):160024. doi: 10.1038/sdata.2016.24
[14] Feagin R A, Williams A M, Popescu S, et al. The use of terrestrial laser scanning (TLS) in dune ecosystems: the lessons learned[J]. Journal of Coastal Research, 2014, 30(1):111-119.
[15] Brooks S M, Spencer T. Temporal and spatial variations in recession rates and sediment release from soft rock cliffs, Suffolk coast, UK[J]. Geomorphology, 2010, 124(1-2):26-41. doi: 10.1016/j.geomorph.2010.08.005
[16] Pardo-Pascual J E, Almonacid-Caballer J, Ruiz L A, et al. Automatic extraction of shorelines from Landsat TM and ETM+ multi-temporal images with subpixel precision[J]. Remote Sensing of Environment, 2012, 123:1-11. doi: 10.1016/j.rse.2012.02.024
[17] Pierre G. Processes and rate of retreat of the clay and sandstone sea cliffs of the northern Boulonnais (France)[J]. Geomorphology, 2006, 73(1-2):64-77. doi: 10.1016/j.geomorph.2005.07.002
[18] Montreuil A L, Bullard J, Chandler J. Detecting seasonal variations in embryo dune morphology using a terrestrial laser scanner[J]. Journal of Coastal Research, 2013, 65(sp2):1313-1318.
[19] Grohmann C H, Garcia G P B, Affonso A A, et al. Dune migration and volume change from airborne LiDAR, terrestrial LiDAR and Structure from Motion-Multi View Stereo[J]. Computers & Geosciences, 2020, 143:104569.
[20] Troy C D, Cheng Y T, Lin Y C, et al. Rapid lake Michigan shoreline changes revealed by UAV LiDAR surveys[J]. Coastal Engineering, 2021, 170:104008. doi: 10.1016/j.coastaleng.2021.104008
[21] 毕海芸, 郑文俊, 曾江源, 等. SfM摄影测量方法在活动构造定量研究中的应用[J]. 地震地质, 2017, 39(4):656-674 doi: 10.3969/j.issn.0253-4967.2017.04.003 BI Haiyun, ZHENG Wenjun, ZENG Jiangyuan, et al. Application of SfM photogrammetry method to the quantitative study of active tectonics[J]. Seismology and Geology, 2017, 39(4):656-674. doi: 10.3969/j.issn.0253-4967.2017.04.003
[22] 魏占玉, Ramon A, 何宏林, 等. 基于SfM方法的高密度点云数据生成及精度分析[J]. 地震地质, 2015, 37(2):636-648 WEI Zhanyu, Ramon A, HE Honglin, et al. Accuracy analysis of terrain point cloud acquired by “structure from motion” using aerial photos[J]. Seismology and Geology, 2015, 37(2):636-648.
[23] Pitman S J, Hart D E, Katurji M H. Application of UAV techniques to expand beach research possibilities: a case study of coarse clastic beach cusps[J]. Continental Shelf Research, 2019, 184:44-53. doi: 10.1016/j.csr.2019.07.008
[24] 郭一栋, 林杭杰, 于谦, 等. 基于无人机SfM摄影测量的海岸盐沼前缘形态变化研究[J]. 海洋学报, 2022, 44(12):148-160 GUO Yidong, LIN Hangjie, YU Qian et al. Morphology of coastal salt marsh margins: a study using UAV-based Structure-from-Motion photogrammetry[J]. Haiyang Xuebao, 2022, 44(12):148-160.
[25] Westoby M J, Brasington J, Glasser N F, et al. ‘Structure-from-Motion’ photogrammetry: a low-cost, effective tool for geoscience applications[J]. Geomorphology, 2012, 179:300-314. doi: 10.1016/j.geomorph.2012.08.021
[26] 国家市场监督管理总局, 中国国家标准化管理委员会. GB/T 35018-2018 民用无人驾驶航空器系统分类及分级[S]. 北京: 中国标准出版社, 2018 State Administration for Market Regulation, Standardization Administration of the People's Republic of China. GB/T 35018-2018 Classification and grading for civil unmanned aircraft system[S]. Beijing: Standards Press of China, 2018.
[27] 中华人民共和国国家质量监督检验检疫总局, 中国国家标准化管理委员会. GB/T 14950-2009 摄影测量与遥感术语[S]. 北京: 中国标准出版社, 2009 General Administration of Quality Supervision, Inspection and Quarantine of the People's Republic of China, Standardization Administration of the People's Republic of China. GB/T 14950-2009 Terms of photogrammetry and remote sensing[S]. Beijing: Standards Press of China, 2009.
[28] 国家市场监督管理总局, 中国国家标准化管理委员会. GB/T 39612-2020 低空数字航摄与数据处理规范[S]. 北京: 中国标准出版社, 2020 State Administration for Market Regulation, Standardization Administration of the People's Republic of China. GB/T 39612-2020 Specifications for low-altitude digital aerial photography and data processing[S]. Beijing: Standards Press of China, 2020.
[29] 中国民用航空局. 中国民用航空总局规章目录[EB/OL]. (2008-01-20)[2023-07-19]. http://www.caac.gov.cn/XXGK/XXGK/ZFGW/201601/t20160122_27768.html Civil Aviation Administration of China. Catalogue of regulations of the Civil Aviation Administration of China[EB/OL]. (2008-01-20)[2023-07-19]. http://www.caac.gov.cn/XXGK/XXGK/ZFGW/201601/t20160122_27768.html.
[30] 贝京阳, 陈杲, 俞晓天. 浙江省南田岛附近潮流特征分析[J]. 海洋湖沼通报, 2022, 44(5):60-66 BEI Jingyang, CHEN Gao, YU Xiaotian. Characterization of tidal current near Nantian Island, Zhejiang province[J]. Transactions of Oceanology and Limnology, 2022, 44(5):60-66.
[31] 象山县地方志编纂委员会. 象山县志: 第一册[M]. 北京: 方志出版社, 2020: 405-407 Xiangshan County Local Records Committee. Xiangshan County Annals: Volume 1[M]. Beijing: Local Records Publishing House, 2020: 405-407.
[32] Laporte-Fauret Q, Marieu V, Castelle B, et al. Low-cost UAV for high-resolution and large-scale coastal dune change monitoring using photogrammetry[J]. Journal of Marine Science and Engineering, 2019, 7(3):63. doi: 10.3390/jmse7030063
[33] Jaud M, Delacourt C, Le Dantec N, et al. Diachronic UAV photogrammetry of a sandy beach in Brittany (France) for a long-term coastal observatory[J]. ISPRS International Journal of Geo-Information, 2019, 8(6):267. doi: 10.3390/ijgi8060267
[34] Mancini F, Dubbini M, Gattelli M, et al. Using unmanned aerial vehicles (UAV) for high-resolution reconstruction of topography: the structure from motion approach on coastal environments[J]. Remote Sensing, 2013, 5(12):6880-6898. doi: 10.3390/rs5126880
[35] Fonstad M A, Dietrich J T, Courville B C, et al. Topographic structure from motion: a new development in photogrammetric measurement[J]. Earth Surface Processes and Landforms, 2013, 38(4):421-430. doi: 10.1002/esp.3366
[36] Jaud M, Grasso F, Le Dantec N, et al. Potential of UAVs for monitoring mudflat morphodynamics (application to the seine estuary, France)[J]. ISPRS International Journal of Geo-Information, 2016, 5(4):50. doi: 10.3390/ijgi5040050
-
期刊类型引用(2)
1. 刘文良,褚宏宪,法鸿洁,王洪松,鲍宽乐,李晓阳,刘京强. 基于机载LiDAR和剖面数据的海滩地形动态监测. 海洋地质前沿. 2025(01): 81-92 .  百度学术
百度学术
2. 吴承强,董超,王建强,陈选博,周宇渤,张朋,仇建东. 瓯江口动力地貌演化的水沙环境研究. 海洋地质前沿. 2025(04): 60-70 . 百度学术
其他类型引用(1)





计量
- 文章访问数: 39
- HTML全文浏览量: 1
- PDF下载量: 13
- 被引次数: 3


